Equação Vetorial Da Reta

Na geometria analítica no espaço, a equação vetorial da reta é uma ferramenta fundamental para descrever a posição e a direção de uma linha reta de forma compacta e precisa. Diferentemente das representações paramétricas ou simétricas, a forma vetorial utiliza vetores para estabelecer uma relação direta entre um ponto conhecido da reta e qualquer outro ponto genérico dessa reta, ligando-se assim à noção de vetor diretor. Compreender essa equação é essencial para avançar em estudos de interseção entre retas e planos, cálculo de distâncias e problemas de geometria tridimensional, sendo um conteúdo de grande importância em cursos de matemática e engenharia.
O que é a equação vetorial da reta no espaço?
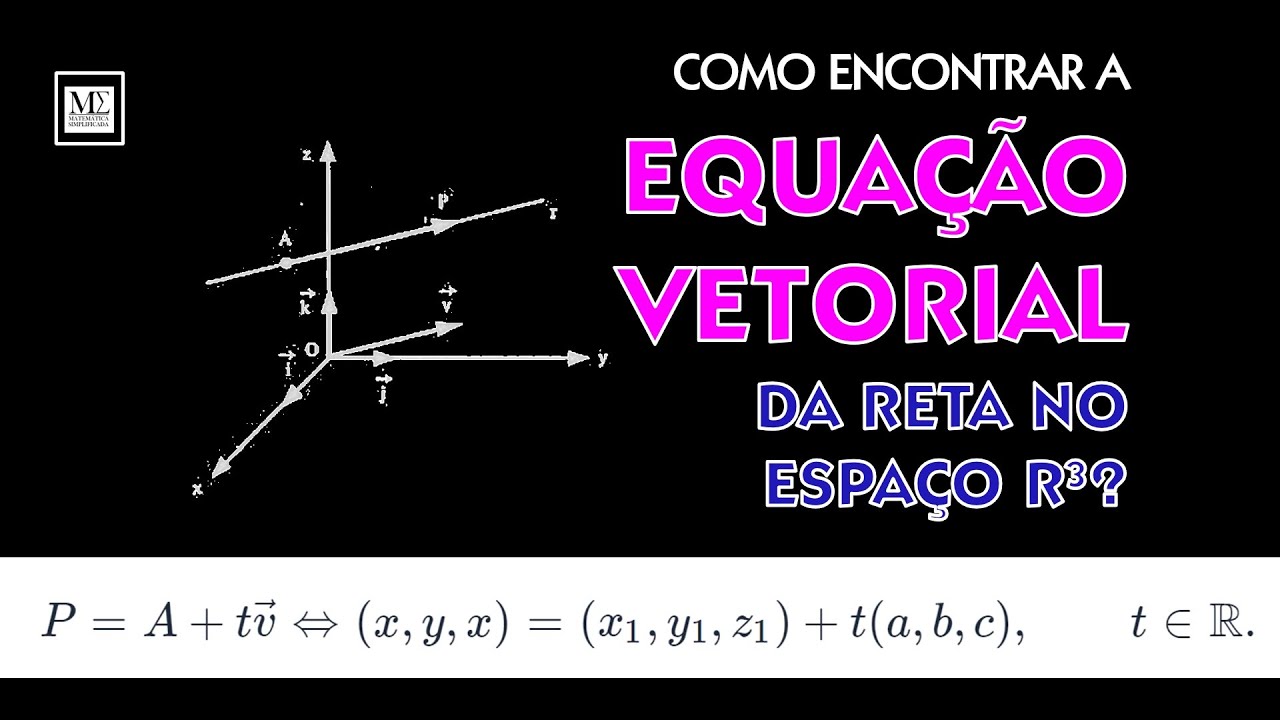
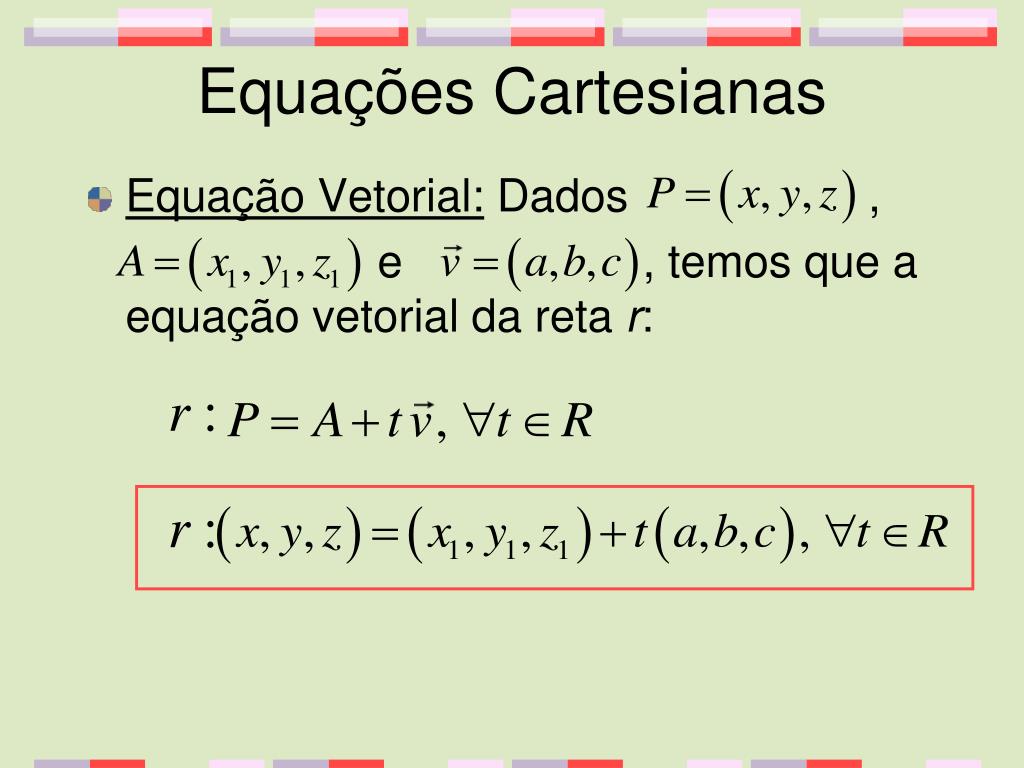
A equação vetorial da reta no espaço tridimensional define todos os pontos X de uma reta como sendo colineares a um ponto fixo A e direcionados por um vetor não nulo v, denominado vetor diretor. A fórmula geral é escrita como X = A + t * v, onde t é um parâmetro real que varre todos os valores possíveis. Dessa maneira, o vetor X representa a posição de um ponto genérico qualquer sobre a reta, enquanto o vetor A indica a posição de um ponto conhecido fixo. Essa igualdade significa que o deslocamento entre X e A é sempre paralelo ao vetor diretor, garantindo que todos esses pontos formem uma linha reta.
Para que serve a equação vetorial da reta?
A principal utilidade da equação vetorial da reta está em sua capacidade de descrever a reta de forma unificada e sem ambiguidades. Ela serve como base para cálculos de interseção entre retas, retas e planos, além de ser essencial na definição de planos como composição de duas retas independentes. Em física e engenharia, é usada para modelar trajetórias, determinar pontos de colisão ou mesmo definir eixos de rotação. Sua versatilidade a torna indispensável em qualquer situação que exija trabalhar com alinhamento, direção e movimento linear no espaço.

Quais são os elementos necessários para escrever a equação?
Para estabelecer a equação vetorial da reta, você precisa obrigatoriamente de dois elementos: um ponto e um vetor diretor. O ponto, geralmente designado por A, B ou P₀, pode ser qualquer ponto conhecido que pertença à reta. O vetor diretor, representado por v ou u, indica a direção e o sentido da linha e pode ser obtido a partir da subtração das coordenadas de dois pontos quaisquer pertencentes à reta. Sem essas duas informações, a equação não pode ser formulada, pois a linha não está completamente definida no espaço.
Como identificar o vetor diretor a partir de dois pontos?
Dados dois pontos A(x₁, y₁, z₁) e B(x₂, y₂, z₂) pertencentes à reta, o vetor diretor v é calculado subtraindo as coordenadas iniciais das finais, ou seja, v = (x₂ - x₁, y₂ - y₁, z₂ - z₁). Esse vetor aponta do ponto A para o ponto B e define a direção da reta. Uma vez determinado, ele pode ser usado diretamente na equação vetorial da reta, substituindo v na fórmula X = A + t * v.
Qual a diferença entre equação vetorial, paramétrica e simétrica?
Embora todas descrevam a mesma reta, cada forma tem suas particularidades. A equação vetorial da reta é a mais compacta, utilizando operações com vetores e ficando como r: X = A + t * v. A equação paramétrica separa as coordenadas, resultando em três expressões: x = x₀ + at, y = y₀ + bt e z = z₀ + ct. Por fim, a equação simétrica, também chamada de equação reduzida, elimina o parâmetro e iguala as expressões, resultando em (x - x₀)/a = (y - y₀)/b = (z - z₀)/c. A escolha entre elas geralmente depende do contexto do problema e da preferência do autor.
Quais são os principais erros ao trabalhar com a equação vetorial?
Um dos equívocos mais comuns é confundir o vetor diretor com um vetor qualquer da reta, quando na verdade ele deve ser paralelo à reta e não necessariamente um vetor posição de um ponto qualquer. Outro erro frequente é não verificar se os pontos utilizados para encontrar o vetor diretor são distintos; pontos coincidentes resultam em um vetor nulo, o que inviabiliza a definição da reta. Além disso, na hora de substituir na equação vetorial da reta, é crucial manter a consistência entre as coordenadas do ponto e as do vetor, garantindo que todos os vetores estejam no mesmo sistema de referência cartesiano.
Como aplicar a equação vetorial em problemas de interseção?
Um dos cenários mais práticos da equação vetorial da reta é encontrar o ponto de interseção com um plano. Nesse caso, escreve-se a reta na forma vetorial e substitui-se suas coordenadas na equação geral do plano, que normalmente é da forma ax + by + cz + d = 0. Ao resolver em relação ao parâmetro t, consegue-se o valor exato no qual a reta toca o plano. Se o sistema possuir solução única, há interseção; se não tiver solução, a reta é paralela ao plano; e se tiver infinitas soluções, a reta está contida no plano. Esse método é amplamente utilizado em computação gráfica e engenharia de software.
Quais são as vantagens de usar a representação vetorial?
A equação vetorial da reta oferece inúmeras vantagens sobre as outras formas. Ela é intrinsecamente geométrica, o que facilita a visualização e a interpretação física do problema. Além disso, é facilmente estendível para dimensões superiores, como o espaço de quatro dimensões, sem perder sua clareza algébrica. O uso de vetores também simplifica operações como o cálculo de distâncias e ângulos, pois permite a aplicação direta de produtos escalares e vetoriais. Por ser concisa, reduz a chance de erros em cálculos longos e complexos.
Resumo dos principais pontos sobre a equação vetorial da reta
- A equação vetorial da reta no espaço é dada por X = A + t * v, unindo um ponto fixo e um vetor diretor.
- Ela é essencial para descrever trajetórias, interseções e orientações no espaço tridimensional.
- São necessários um ponto conhecido e um vetor diretor para definir completamente a reta.
- Difere da equação paramétrica e da simétrica ao utilizar a linguagem vetorial de forma direta.
- É particularmente útil em problemas de interseção com planos e no ensino de geometria analítica.
Perguntas frequentes sobre a equação vetorial da reta
A equação vetorial da reta pode ser usada em duas dimensões?
Sim, a equação vetorial da reta pode ser aplicada no plano, bastando considerar vetores com apenas duas coordenadas (x e y). A lógica permanece a mesma, com um ponto A e um vetor diretor v no plano.
O que acontece se o vetor diretor for o vetor nulo?
Se o vetor diretor for nulo, a equação X = A + t * v não define uma reta, pois não há direção. Nesse caso, a expressão representa apenas o ponto A, já que qualquer multiplicação por t resulta no vetor nulo.
Como encontrar a equação vetorial a partir da equação simétrica?
Para converter da equação simétrica (x - x₀)/a = (y - y₀)/b = (z - z₀)/c para a forma vetorial, basta identificar o ponto A(x₀, y₀, z₀) e o vetor diretor v(a, b, c). Em seguida, substitui-se na fórmula X = A + t * v, completando assim a conversão.

A equação vetorial é a mesma para qualquer reta no espaço?
Sim, o método é universal. Qualquer reta no espaço tridimensional pode ser descrita pela equação vetorial da reta, desde que sejam conhecidos um ponto sobre ela e um vetor diretor não nulo. A única variação está nos valores numéricos, mas a estrutura da equação é sempre a mesma.
É necessário usar sempre o parâmetro "t"?
O nome do parâmetro é uma convenção, mas pode ser qualquer letra (mais comum usar t, λ ou s). A essência está em ter uma variável que percorra todos os valores reais, permitindo que a equação X = A + t * v gere todos os pontos possíveis da reta.
